2自由度の減衰ありって計算が複雑なんでしょ?もう計算しなくていいの?

かなり複雑な計算だから、毎回計算する必要は無いよ。でも一度、どのように解いていけばよいか、というのは理解しておいた方が、運動を理解しやすくなるから一度解いてみようか。
本記事では、2自由度の場合、減衰ありの状態で、強制振動の運動方程式を見てみましょう。
ちなみにこの2自由度のモデルは、動吸振器、あるいはダイナミックダンパーと呼ばれるものに相当します。
細かい計算は抜きですが、こういう風に解いていくんだ、という流れを見ておきましょう。
本記事をおススメする人
- 2自由度の振動について減衰がある場合を理解したい人
- 動吸振器、ダイナミックダンパーの勉強をしたい人
- 物理を勉強していて興味がある人、仕事で振動の知識を使う人
動画でも解説しておりますので、是非参考にしていただければと思います。
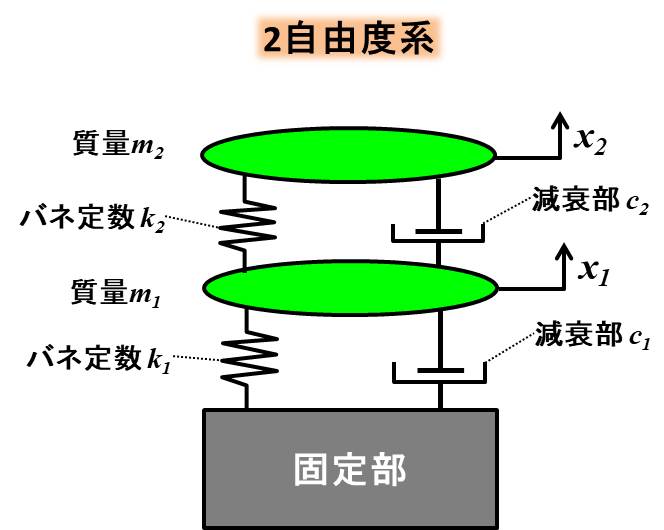
2自由度の減衰強制振動のモデル
まず、自由振動のモデルは下記にようになります。
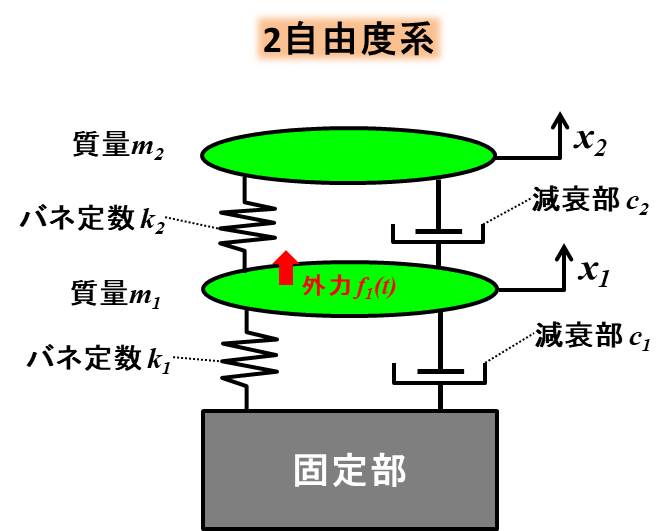
このモデルに強制振動を加えるわけですね。
質量\(m_1\)に周期的外力\(f_1=Fcosωt\)を付け加えましょう。
運動方程式は下記のようになりますね。
連立の線形微分方程式ですね。
運動方程式を解く
さて、自由振動の場合、①の右辺がゼロになるので、簡単なはずなのですが、それでも計算が複雑になることを過去の記事で解説しました。
じゃあ、解けないじゃないか!という声が聞こえてきそうですが、
今回は、複素数を使用して、解いていきます。
複素数の解法については下記を参考にしてください。
さて、複素数での解き方のおさらいですが、まず、複素数の特殊解を設定するのでしたね。
複素数の特殊解を考えるときに、大事な公式としてオイラーの公式があり、これを使います。
オイラーの公式
$$e^{iθ}=cosθ+isinθ$$
このオイラーの公式を見ていると、\(cos\)だけでなく\(sin\)の項がありますね。
ということで、\(sin\)の項を作りましょう。
\(Fcosωt\)という周期的外力が\(m_1\)に与えられていますが、\(Fsinωt\)の場合も考えてみましょう。
\(cos\)を\(sin\)にすると90°位相がずれるだけで、この場合の質量\(m_1、m_2\)の変位を\(y_1、y_2\)とします。
そうすると、運動方程式は下記のようになります。
行列を使って連立方程式を解く
$$\left(\begin{array}{cc}A&B\\C&D\end{array}\right)\left(\begin{array}{c}x_1\\x_2\end{array}\right)=\left(\begin{array}{c}F\\0\end{array}\right)$$
この連立方程式の解は、行列式$Δ=AD-BC$とすると、
$$x_1=\frac{D}{AD-BC}F=\frac{D}{Δ}F$$
$$x_2=\frac{-C}{AD-BC}F=\frac{-C}{Δ}F$$
連立方程式の行列式をΔと置くと、
\(Z_1\)と\(Z_2\)を求めると、
\(Z_1、Z_2\)は複素数なので、下記のように表せます。
特殊解\(z_1、z_2\)に代入すると、
実部と虚部に分けて書くと、
今回与えられた周期的な外力は、\(Fcosωt\)なので、変位\(x_1、x_2\)はこの複素数の実部に相当します。
三角関数の合成の公式から、
あれ?ここで終わり??\(A_1\)とか未知数のまま?
ふつうはここまでの計算で、数値計算で大丈夫になることが多いよ。\(A_1\)などの未知数は\(z\)の振幅から求めることができるから、未知数ではないんだよ。
計算過程で勝手においた\(A\)や\(B\)ですが、これは計算すると求めることができます。
⑧式や⑨式から\(Z_1\)と\(Z_2\)について、複素数表記がされているので、これらを力業で実部と虚部に分けることで\(A\)と\(B\)の値を出すことができます。
計算が非常に面倒なので、余力のある人は解いてみてください。
\(A\)と\(B\)を求めた上で、振幅\(X_1\)と\(X_2\)がどのようになるか、結果を記しておくと、
\(a\)と\(b\)は行列式Δの実部と虚部となっています。
これで減衰強制振動の特殊解が求まりました。
特殊解の挙動
それでは、この特殊解の挙動を実際に見てみましょう。
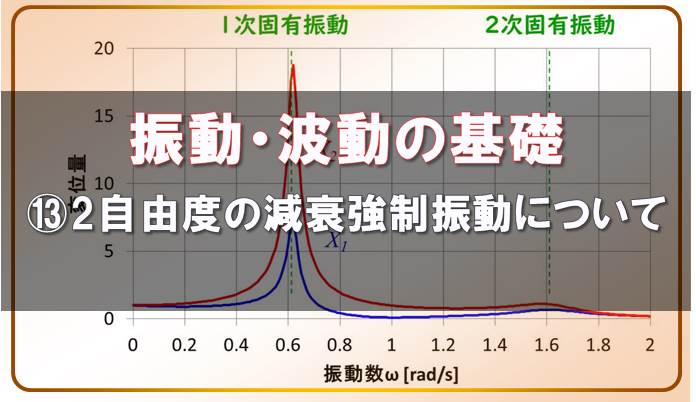
質量、バネ定数、外力の振幅は全て1、減衰係数は0.1で計算したグラフが下記です。
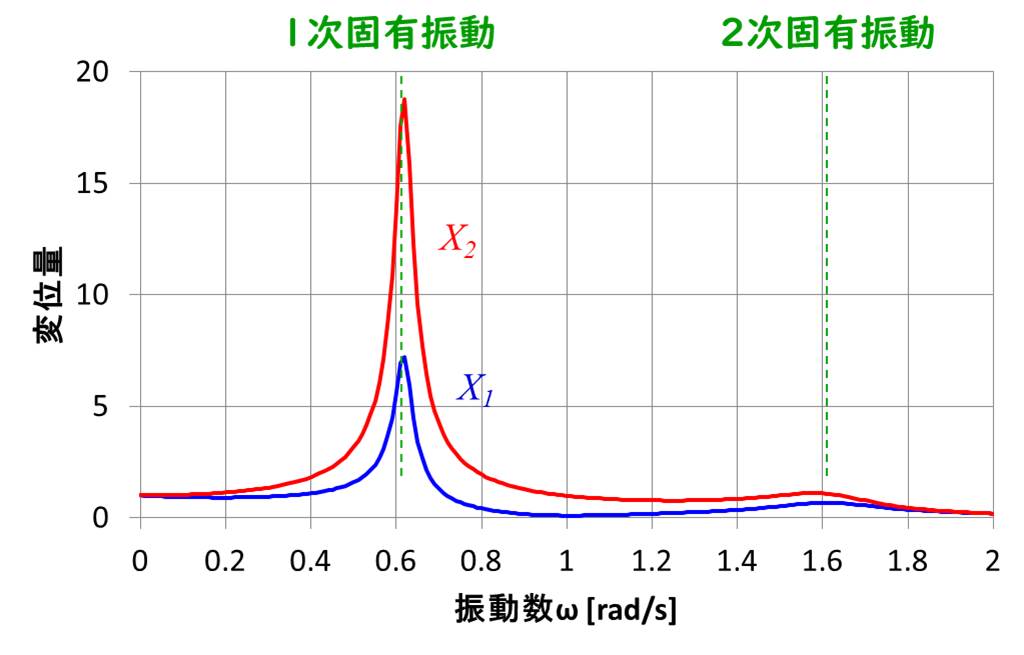
それぞれの固有振動モードで、有限の値をとり、さらに2次固有振動モードの振幅が非常に小さくなりました。
このモデルは、振動を抑える構造としてよく扱われ、動吸振器やダイナミックダンパーと呼びます。
1つの質点だと、共振したときの振動が大きくなってしまいますが、2つ目の質点を付加させることで、振動を抑えようというものです。
共振を抑えるために、どのような\(m_2、k_2、c_2\)を選択すればよいか、このモデルによって最適値が計算されるわけです。
まとめ
以上、2自由度の減衰強制振動について解説しました。
減衰が入ることで、共振したときの振幅が有限の値になる、ということは1自由度のときと変わりません。
このことを利用して、動吸振器やダイナミックダンパーの設計がなされます。
動吸振器の設計については、リンク先の記事で解説していますので、最後にご紹介させていただきます。
参考文献
- 振動工学の基礎:岩壺卓三、松久寛、森北出版株式会社
- 機械力学-振動の基礎から制御まで:日高照晃、小田哲、川辺尚志、曽我部雄次、吉田和信、朝倉書店
- Wikipedia
初心者向けの振動工学の教科書・参考書をこちらで紹介していますので、参考にしていただければと思います。
本サイトの振動工学のページはこちら。
初心者向けの教科書・参考書はこちら
振動工学の記事一覧はこちら
次の記事 → 振動・波動の基礎-⑭動吸振器の設計と定点理論のグラフ